 Blog
Blog
 Download
Download
 Videos
Videos
 Buy Online
Buy Online
Provide High Performance 360°
Rotary Solutions for Worldwide
Before diving straight into the features of the slip ring induction motor, we need to understand several key aspects with respect to the usage of different kind of
motors.
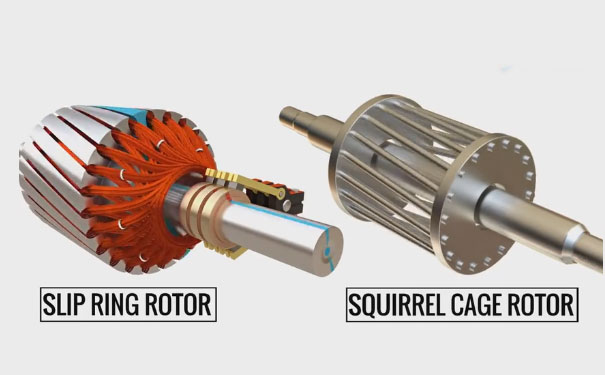
Besides, the application slip ring induction motors, there are other devices which are quite commonly used in the industrial sector. Some of them include wound
motors and squirrel cage induction motor, both of which have their own set of advantages.
But, of late, use of wound motor is diminishing because of the of the presence of squirrel cage motor. The reason why it is garnering massive relevance in terms of
usage is the presence of something called static drive. The combination ofsquirrel cage motor and the static drive make the entire working less complex andcost-effective. However, one simply cannot discount the fact that wound motor is here to stay for a longer period of time.
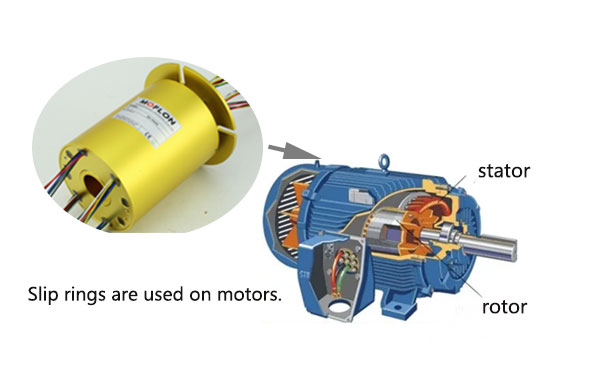
Now a question arises in the midst of wound motor and the squirrel cage induction motor is, what is the role slip ring induction motor? A slip ring induction motor
is used only in such cases where the need of the hour is minimal to put a check on the starting current. Having stated the nuance of slip ring induction motor with
respect to other forms, it is time we look at some features.
Features
The initiation of the working or operation in slip ring motors begins with an influx of a certain level of resistance, which gradually diminishes as the motor
enters the subsequent phases. The induction of the resistance in the system is done through the slip ring rotor circuit. Some of the basic features with respect
to the varied response to the simulation of the rotor circuit are as follows.
.The reason why slip ring motor is used as limiting current element is that the external resistance, which is added to the system, stabilizes the total impedance
level of motor windings. This has a two-fold effect and not only limits the starting current but also augments the starting power factor.
.The slip ring motor can be customized easily to meet the varying requirements of starting speed and torque requirement. This can be achieved primarily due to the
fact that the performance requirement of the slip ring motor could easily be altered. This alteration was possible because the entire slip ring motor began the
operational process with rotor circuit leading the way.
. Quite naturally, the speed of the slip ring could be altered with the addition of external resistance. As a result of which, the torque could be adjusted and
unadjusted with a constraint of the certain value of pull-out torque. The modulation of the torque level also depends on the value of pull-out with varying
speed range under the differential level of resistance.
The above features justify the statement that in a case of limiting the starting current or external resistance, there is no better substitute to slip ring motor.
However, with rapidly evolving slip ring technology, we could get a better substitute.



